操作系统锁与同步机制详解:mutex、semaphore、condition variable、spinlock 与 futex
两个线程同时给同一个计数器加 1,看起来很小的一件事,最后结果却可能少加一次。
原因其实很简单。count++ 在源码里是一行,机器执行时通常要经历读取、计算、写回几个步骤。线程 A 刚读到旧值,还没写回;线程 B 也读到了同一个旧值。两边各自算出新值,最后写回的却是同一个结果。
为了避免这类并发问题,操作系统提供了锁和一系列同步机制。它们要解决的问题不只是一段代码能不能同时执行,还包括线程该不该阻塞、资源数量怎么控制、条件不满足时怎么等待。到了内核里,还要继续考虑中断、抢占、多 CPU、实时性和调度延迟。
这篇文章只讲操作系统视角下的同步机制。Java 里的 synchronized、ReentrantLock、AQS、CAS 和锁优化已经在 Java 锁详解 里展开过,这里不会重复那套内容。本文重点看 mutex、semaphore、condition variable、spinlock、futex 这些概念各自解决什么问题。等理解了这些同步原语,再去看 死锁详解,就更容易看懂“等待关系为什么会绕成环”。
先通过一张表大致看一下这些同步机制分别解决什么问题:
| 机制 | 主要解决什么 | 等待方式 | 常见场景 |
|---|---|---|---|
| mutex | 临界区互斥 | 语义上等待锁可用,实现可自旋/阻塞 | 保护共享结构 |
| spinlock | 极短临界区互斥 | 忙等 | 内核中不能睡眠的路径 |
| semaphore | 资源计数、并发数量控制 | 计数为 0 时等待 | 缓冲区槽位、连接数、并发任务数 |
| condition variable | 等某个共享状态变为真 | 原子释放 mutex 并等待 | 队列非空、任务完成、缓冲区非满 |
| futex | 用户态锁的阻塞/唤醒底座 | 用户态快路径,内核慢路径 | pthread mutex、运行时同步器 |
| memory barrier | 约束内存访问顺序和可见性 | 通常不负责阻塞 | 无锁结构、内核同步、设备寄存器访问 |
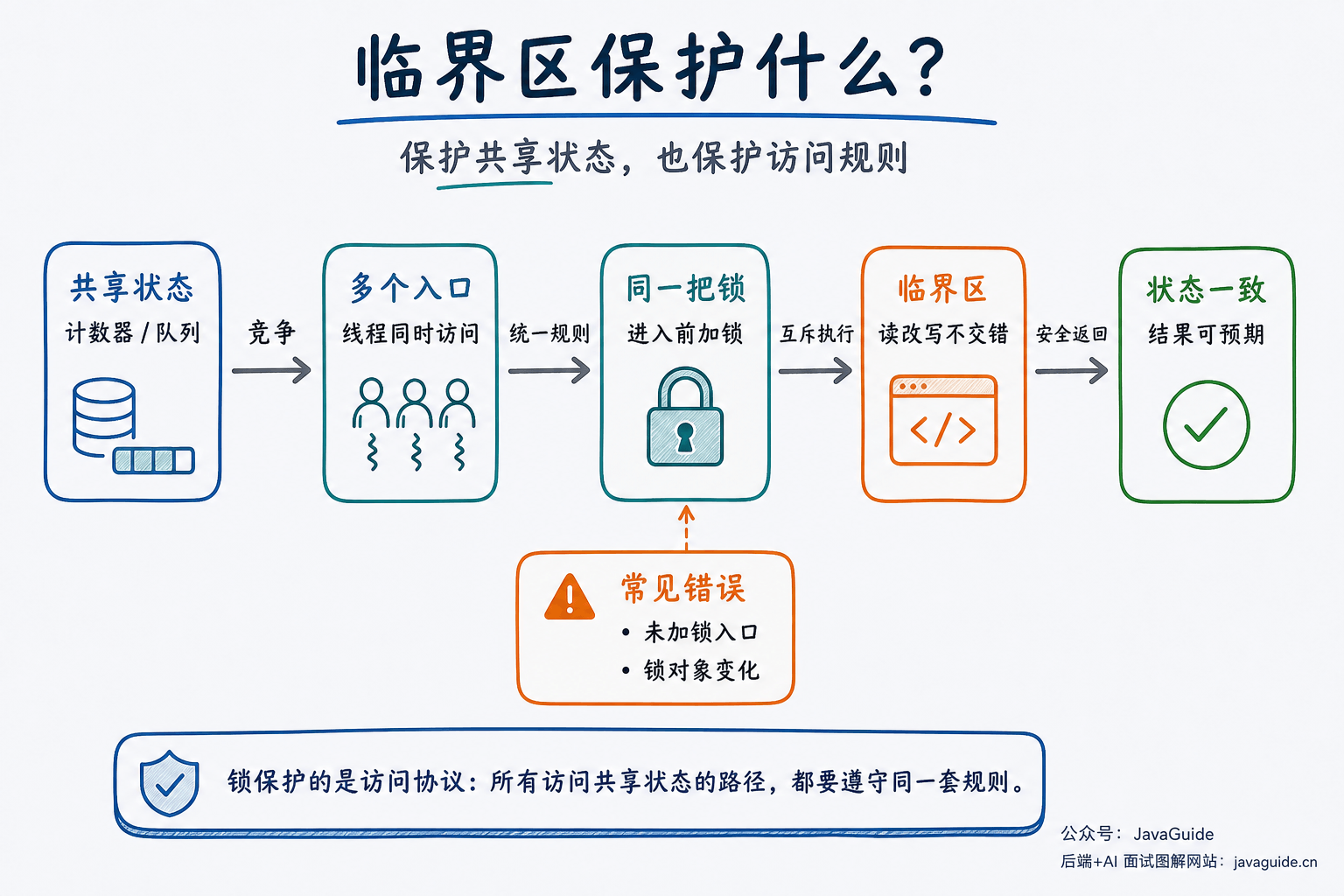
临界区到底在保护什么?
临界区(critical section) 指的是访问共享可变状态、并且不能被多个执行流随意交错执行的代码段。它可能是用户程序里的一段计数器更新,也可能是内核里修改调度队列、文件描述符表、页表、设备状态的代码。
评价一种锁或同步机制时,可以从正确性、进展性、公平性和性能这 4 个角度看。
第一是正确性。 同一时刻不能让多个执行流随意交错修改共享状态;多 CPU 场景里,还要有必要的同步语义,让一个线程释放锁前写入的状态,能被后续拿到同一把锁的线程按预期看到。
第二是进展性。 同步机制本身不能把所有等待者都困住,导致系统再也没人能往前走。
第三是公平性。 多个线程都在等同一把锁时,尽量避免某个线程长期拿不到锁。实际系统不一定严格 FIFO,但饥饿问题必须被认真对待。
第四是性能。 没有竞争时,加锁和解锁路径应该足够轻;竞争很激烈时,等待线程不能把 CPU 大量浪费在无效循环上。
OSTEP 讲锁时也会关注这些问题:能不能真的做到互斥,等待线程会不会饿死,没有竞争时要付多少成本,单 CPU 和多 CPU 下的表现有什么差别。只问“哪种锁最快”意义不大,同一把锁放到不同机器、不同临界区长度、不同竞争强度下,答案经常会变。
互斥锁:先把门关上,再改共享状态
回到前面的 count++。如果这段自增必须算对,最直接的办法就是在读、加、写这几个动作外面加一把 互斥锁(mutex)。谁先拿到锁,谁先改;没拿到锁的线程在门外等着。
用 POSIX 线程写出来大概是这样:
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int count = 0;
void increase(void) {
pthread_mutex_lock(&mutex);
count++;
pthread_mutex_unlock(&mutex);
}这段代码里,pthread_mutex_lock() 不只是做一次标记。从 POSIX 语义看,如果锁已经被其他线程持有,调用线程会等待锁变得可用,成功返回后才拥有这把锁。
具体实现可以更灵活。很多 pthread mutex 或语言运行时里的锁,可能先在用户态短暂自旋;如果竞争还没解除,再走 futex 之类的阻塞路径。对使用者来说,重点放在语义上:拿到锁之前不能进入临界区,拿到锁之后才拥有被保护状态的访问权。
mutex 适合守住边界清楚的共享状态修改。更新引用计数、改链表指针、维护进程表、更新一小段内存缓存,都很典型。写这类代码时,最该先确认的是这把锁负责保护哪一份状态,以及所有访问这份状态的入口有没有遵守同一套规则。
举个很常见的坑:一个共享对象有 5 条访问路径,其中 4 条都会拿同一把锁,剩下一条为了“方便”直接改字段。这样一来,前面 4 条路径写得再认真,互斥关系也被绕开了。锁保护的是访问协议,光把变量放在锁旁边没有用。
还有一个细节,mutex 通常有持有者语义。简单说,谁拿锁,谁释放。Linux 内核文档介绍 lock types 时专门提到 owner semantics,大多数锁都要求获取锁的上下文负责释放。信号量不太一样,它更像计数器,后面讲到它时这个差别会很明显。
自旋锁:别睡,原地等一小会儿
mutex 拿不到时,线程可以睡下去,等内核以后再唤醒它。自旋锁(spin lock) 反过来:先别睡,继续在 CPU 上循环检查锁有没有释放。
这听起来有点傻,实际要看等待时间。
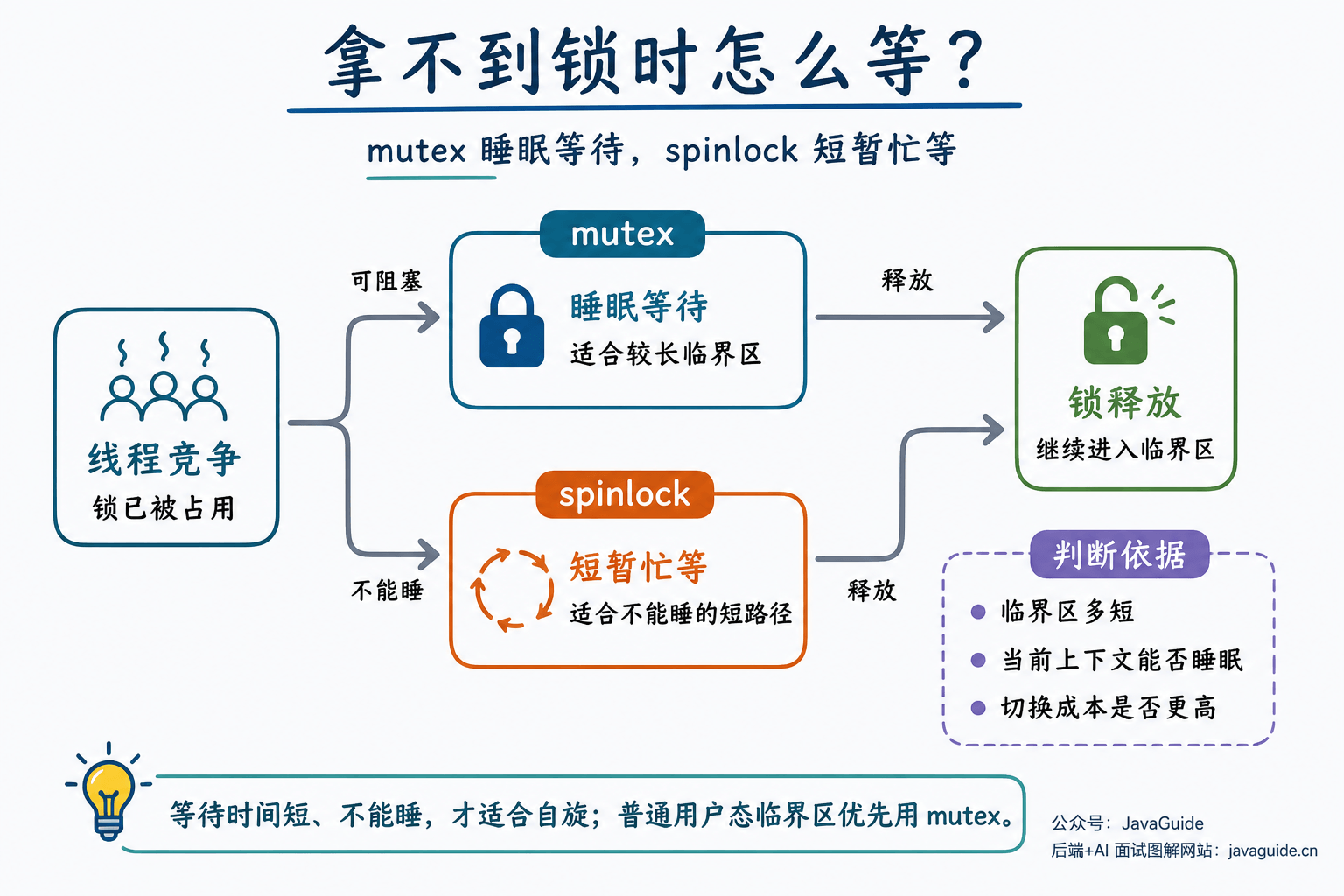
如果一把锁只保护几行代码,持锁线程马上就会离开临界区,等待线程睡下去反而不划算。睡眠和唤醒都要经过调度器,期间还可能发生上下文切换;在多 CPU 机器上,持锁线程也许正在另一个 CPU 上执行,几条指令后就释放锁。这个时候,等待线程原地转几圈,成本可能更低。
但自旋有两个硬限制。
第一,临界区必须短。 持锁线程如果要访问磁盘、等待网络、分配可能睡眠的内存,等待方就会把 CPU 时间烧在空转上。
第二,要小心单 CPU 或可抢占场景。 如果持锁线程被抢占,而等待线程在同一个 CPU 上自旋,等待线程转得再努力也等不到释放动作。
在非 PREEMPT_RT Linux 内核里,普通 spinlock_t 获取后会隐式禁用抢占;如果还要防止中断处理程序在本 CPU 上打断当前临界区,才会使用 spin_lock_irq()、spin_lock_irqsave() 这类带后缀的接口。也就是说,plain spin_lock() 不等于总是禁用硬中断。
Linux 内核文档把锁粗分为 sleeping locks、CPU local locks 和 spinning locks。mutex、semaphore、rw_semaphore 属于可能睡眠的锁;raw_spinlock_t 在普通内核和 PREEMPT_RT 内核里都是严格自旋锁。spinlock_t 的语义会随 PREEMPT_RT 改变:非 PREEMPT_RT 下,它映射到 raw_spinlock_t;PREEMPT_RT 下,它基于 rt_mutex 实现,不再隐式禁用抢占,_irq / _irqsave 后缀也不再直接改变硬中断禁用状态。
用户态业务代码通常不应该自己写自旋锁。库和运行时可以在非常短的路径上做自适应自旋,但应用代码里手写 while 循环等锁,多数时候只是在把 CPU 变热。
信号量:不是只有 0 和 1 的锁
信号量(semaphore) 可以看成一个不会降到负数的计数器。sem_wait() 尝试把计数减 1;如果当前值大于 0,减完就继续;如果当前值是 0,调用线程阻塞。sem_post() 把计数加 1,并可能唤醒等待者。
计数初始值设为 1 时,信号量可以当互斥锁用:
sem_t sem;
sem_init(&sem, 0, 1);
sem_wait(&sem);
// critical section
sem_post(&sem);不过,信号量真正常见的用途是“资源计数”。比如缓冲区有 N 个空槽,连接池最多允许 N 个连接,某类任务最多同时跑 N 个。这个时候,信号量的初始值就是资源数量。
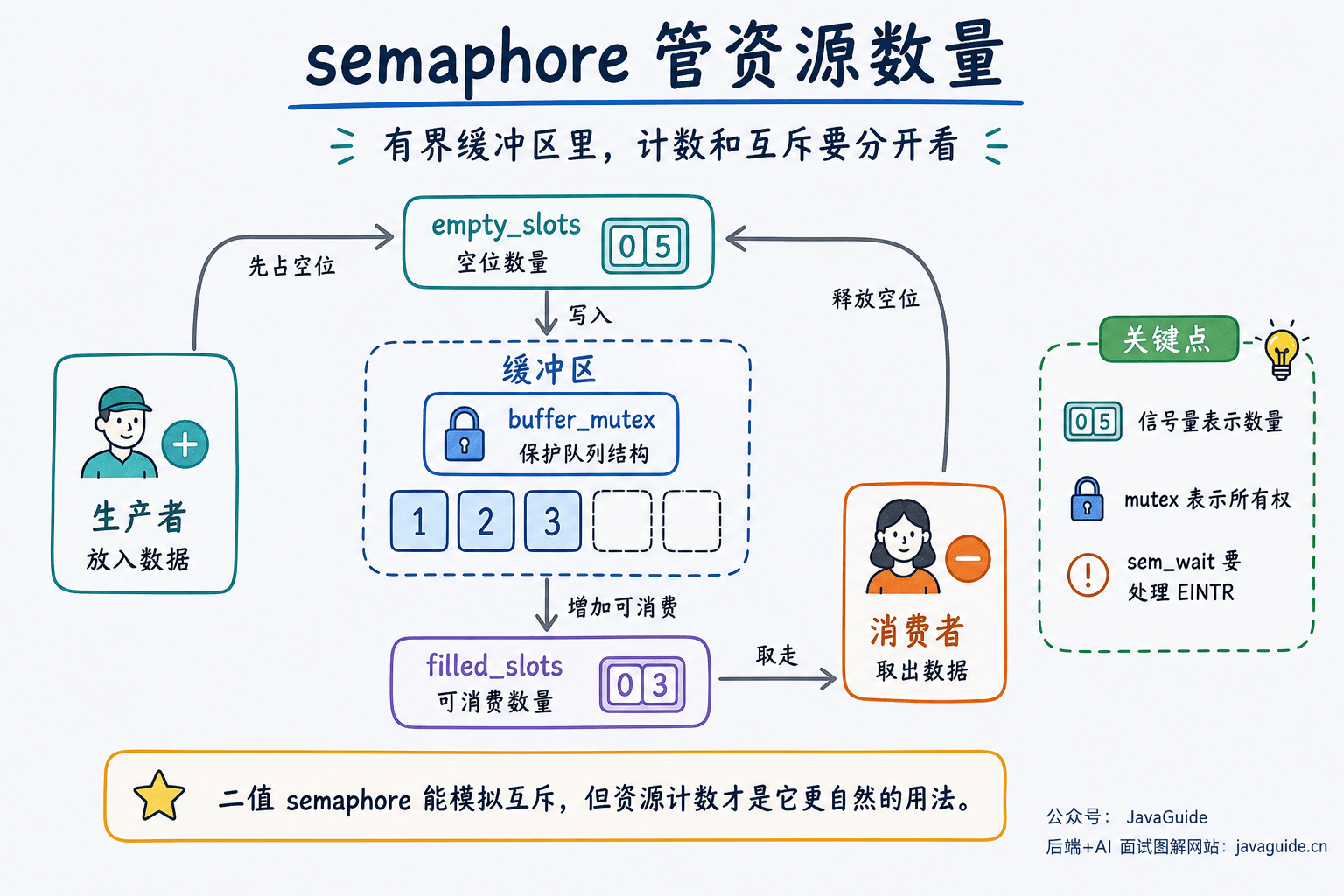
二值信号量可以模拟互斥,但它不等于 mutex。mutex 强调持有者和临界区所有权,semaphore 强调计数和许可数量。一个有界缓冲区通常会把这两类问题拆开:信号量管槽位数量,mutex 管缓冲区内部结构。
下面代码省略了 item_t 和缓冲区的具体实现,只保留同步骨架:
#include <errno.h>
#include <pthread.h>
#include <semaphore.h>
#include <stdlib.h>
#define BUFFER_SIZE 1024
sem_t empty_slots;
sem_t filled_slots;
pthread_mutex_t buffer_mutex = PTHREAD_MUTEX_INITIALIZER;
void init_buffer(void) {
if (sem_init(&empty_slots, 0, BUFFER_SIZE) == -1) {
abort();
}
if (sem_init(&filled_slots, 0, 0) == -1) {
abort();
}
}
static void wait_sem(sem_t *sem) {
while (sem_wait(sem) == -1) {
if (errno == EINTR) {
continue;
}
abort();
}
}
void producer(void) {
item_t item = produce_item();
wait_sem(&empty_slots);
pthread_mutex_lock(&buffer_mutex);
put_item(item);
pthread_mutex_unlock(&buffer_mutex);
sem_post(&filled_slots);
}
void consumer(void) {
wait_sem(&filled_slots);
pthread_mutex_lock(&buffer_mutex);
item_t item = take_item();
pthread_mutex_unlock(&buffer_mutex);
sem_post(&empty_slots);
consume(item);
}empty_slots 记录还有多少空位,filled_slots 记录已经有多少可消费元素。生产者先消耗一个空位,放入数据后增加一个可消费元素;消费者反过来。buffer_mutex 只负责保护 put_item() 和 take_item() 对缓冲区结构的修改。
wait_sem() 里重试 EINTR 也不是装饰。Linux man-pages 明确列出 sem_wait() 可能因为信号处理程序打断而返回 -1,并把 errno 设为 EINTR。示例代码如果完全不处理这个分支,读者复制以后很容易留下偶发 bug。
Linux Kernel locking 文档明确说明,semaphore 可以用于串行化和等待;写新代码时,更推荐把互斥、事件完成这类语义拆到 mutex、completion 等机制里。原因之一是 semaphore 没有明确 owner,PREEMPT_RT 无法为它提供优先级继承,阻塞在 semaphore 上可能出现优先级反转。
条件变量:等的不是锁,是某个条件成立
mutex 解决的是“同一时刻谁能进临界区”。但很多时候,线程进入临界区后发现条件还没满足。
比如消费者拿到锁后发现队列为空。它不能继续取数据,也不能一直拿着锁睡觉。否则生产者拿不到锁,没法往队列里放数据,系统就僵住了。
条件变量(condition variable) 解决的就是这种等待条件的问题。它通常和 mutex 配套使用:
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t not_empty = PTHREAD_COND_INITIALIZER;
queue_t queue;
void consumer(void) {
pthread_mutex_lock(&mutex);
while (queue_empty(&queue)) {
pthread_cond_wait(¬_empty, &mutex);
}
item_t item = queue_pop(&queue);
pthread_mutex_unlock(&mutex);
consume(item);
}
void producer(item_t item) {
pthread_mutex_lock(&mutex);
queue_push(&queue, item);
pthread_cond_signal(¬_empty);
pthread_mutex_unlock(&mutex);
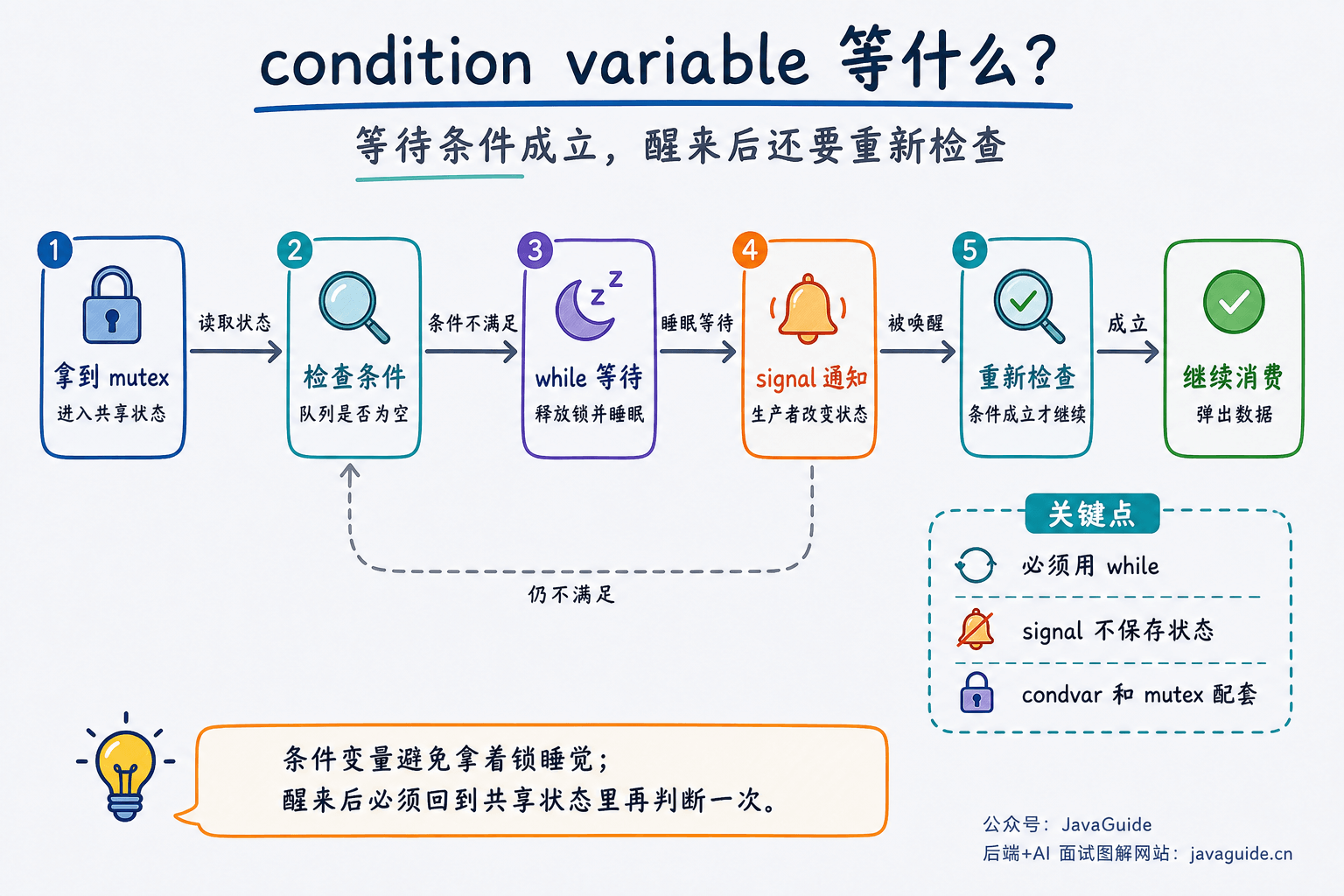
}pthread_cond_wait() 做了一件非常关键的事:它会原子地释放 mutex,并让当前线程等待条件变量;被唤醒返回前,又会重新获得 mutex。这个“释放锁并睡眠”的动作必须连在一起,否则就可能出现丢信号:线程刚准备睡,生产者已经发完通知,消费者随后睡下去,再也没人叫醒它。
条件变量有三条使用规则很重要。
第一,等待条件要写在 while 里,不要写成 if。 POSIX 明确允许 condition wait 出现 spurious wakeup,也就是线程醒来时条件未必成立。即使没有这种唤醒,多个消费者同时被唤醒后,也可能只有一个线程抢到数据,其他线程再次发现队列为空。
第二,条件变量本身不保存状态,真正的状态必须放在受 mutex 保护的共享变量里。pthread_cond_signal() 不是往队列里塞一张永久有效的票。如果 signal 发生时没人等待,这次通知可能就过去了。真正决定消费者能不能继续执行的,是 queue_empty() 背后的队列长度。
第三,同一个条件变量在有等待者期间,应该和同一把 mutex 配套使用。 POSIX 把这叫动态绑定:只要还有线程阻塞在某个 condition variable 上,其他线程如果拿另一把 mutex 去等待同一个 condition variable,行为就是未定义的。这个规则平时不常被提起,但它能解释为什么条件变量代码通常会把“状态变量、mutex、condvar”放在同一个数据结构里管理。
很多条件变量 bug 都出在这里:把 signal 当状态,或者醒来后不重新检查条件。
futex:用户态先试,失败再找内核
Linux 里经常会听到 futex(fast userspace mutex)。名字里有 mutex,但 futex 更像一块搭锁的地基。
futex 的设计思路是:没有竞争时,完全在用户态用原子指令修改一个 32 位整数;只有需要睡眠或唤醒等待者时,才进入内核调用 futex()。这样可以避开每次加锁都系统调用的开销。
一个简化版流程是:
- 线程先在用户态用原子操作尝试把锁字从 0 改成 1。
- 如果成功,说明没人竞争,直接进入临界区。
- 如果失败,说明锁被占用,再调用
FUTEX_WAIT让内核把线程挂起。 - 持锁线程释放锁后,如果发现有人等待,调用
FUTEX_WAKE唤醒一个或多个等待者。
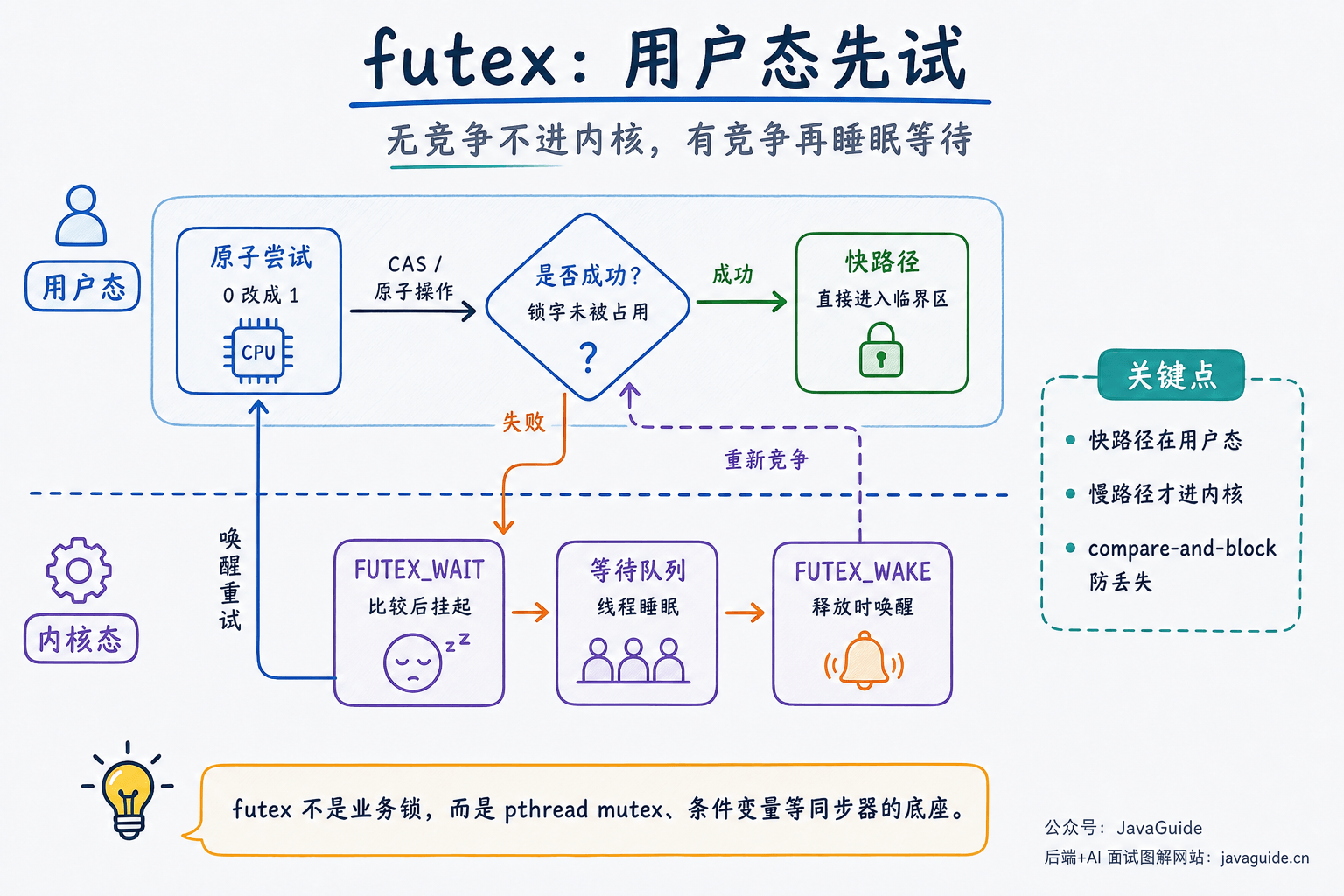
FUTEX_WAIT 走的是 compare-and-block:内核会先确认 futex word 仍然等于调用者传入的期望值,只有匹配时才把线程挂起。这个比较和阻塞动作是原子的,所以它能把用户态原子操作和内核睡眠队列接起来。
man-pages 对 futex 的描述也强调了这一点:futex 操作围绕一个用户空间地址上的 32 位值展开,常见操作包括等待和唤醒。应用一般不会直接把 futex 当业务锁使用;pthread mutex、条件变量、运行时同步器这类库,会在更高层同步原语里用到它。
所以,看 Linux 用户态锁时可以记住这句话:快路径尽量留在用户态,慢路径才进内核排队睡眠。
原子指令:锁总得有一个不可拆的起点
无论 mutex、spinlock 还是 futex,最后都要落到某种硬件支持的原子操作上。否则“检查锁是否空闲”和“把锁标记为已占用”之间仍然会被别的线程插进来。
常见原子指令包括 test-and-set、compare-and-swap、fetch-and-add 等。它们保证对某个内存位置的读改写不会被其他 CPU 观察成半截状态。
早期教材里还会讲“关中断实现锁”。在单 CPU 内核里,关中断可以防止当前执行流被中断处理打断,从而保护某些内核临界区。但这个方法有很强边界:它只影响当前 CPU,不能阻止另一个 CPU 同时访问同一份内存。多处理器系统里,跨 CPU 的互斥仍然要靠原子指令、缓存一致性协议和内核锁规则。
这也是为什么操作系统课程会先讲原子指令,再讲锁实现。锁对程序员暴露的是 lock() / unlock(),底下靠的是 CPU 和内核共同维护的不可拆更新。
锁还负责内存顺序
锁不只是在临界区门口排队。多 CPU 系统里,CPU 和编译器都可能调整内存访问顺序;如果同步语义不够,一个 CPU 写入的状态,另一个 CPU 未必会按源码顺序看到。
所以,锁获取和锁释放通常还带有内存顺序含义。可以先按这两个词理解:
- acquire:拿到锁之后的内存访问,不能被重排到拿锁之前。
- release:释放锁之前的内存访问,不能被重排到释放锁之后。
Linux 内核内存屏障文档也把 LOCK 操作归到 acquire,把 UNLOCK 操作归到 release。正确使用 mutex、spinlock 这类同步原语时,开发者通常不需要手写内存屏障;只有写无锁结构、驱动、内核底层同步或设备交互时,才需要直接面对 memory barrier。
这里还有一个边界:acquire 和 release 是最小保证,二者配合不等于任意场景下的 full memory barrier。普通业务代码一般不需要背这些细节,但如果已经在写无锁队列、RCU、驱动或 MMIO 访问,这个差别就不能跳过。
优先级反转:锁也会影响调度
锁还会把调度问题带进来。
经典问题是优先级反转。低优先级线程 L 持有一把锁,高优先级线程 H 等这把锁;这时中优先级线程 M 持续运行,把 L 抢占掉。结果是 H 明明优先级最高,却一直等不到 L 释放锁。
解决思路之一是优先级继承。持锁的低优先级线程临时继承等待者中的最高优先级,尽快跑完临界区并释放锁。
POSIX mutex 的 protocol 属性里就有 PTHREAD_PRIO_INHERIT 和 PTHREAD_PRIO_PROTECT。Linux 的 rt_mutex 也围绕 priority inheritance 设计,用来支持 PI-futex 和带优先级继承属性的 pthread mutex。
这也是前面说 semaphore 没有 owner 会带来限制的原因。没有明确持有者,系统就不知道该提升谁的优先级;Linux Kernel locking 文档也指出,semaphore 在 PREEMPT_RT 下无法提供优先级继承,阻塞在 semaphore 上可能导致优先级反转。
用户态锁和内核锁有什么不同?
用户态程序关心的是线程之间如何协作。Pthreads 给你 mutex、condition variable、semaphore;C++、Java、Go、Rust 又在各自运行时和标准库里封装出更贴近语言的同步工具。
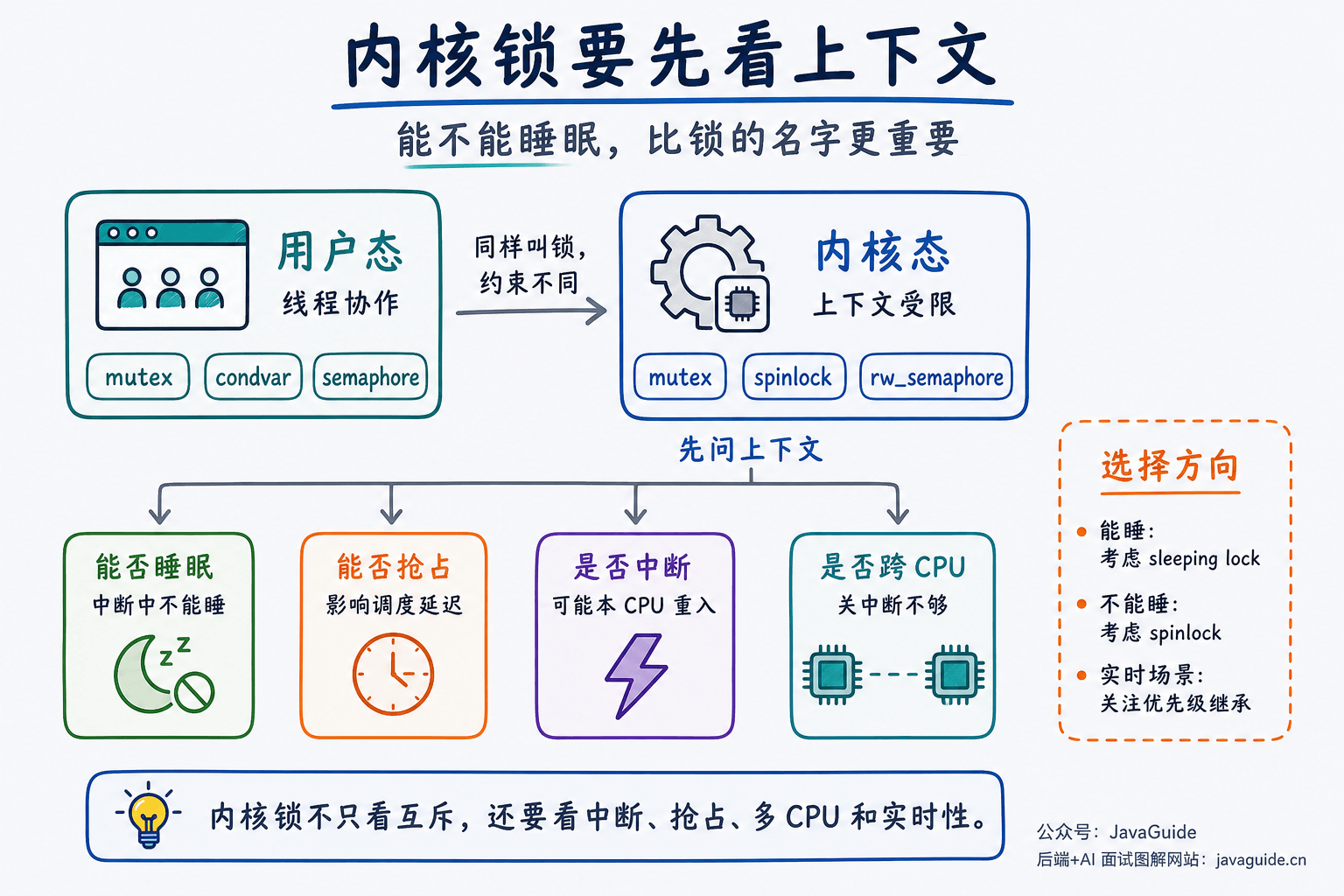
内核里的锁多了一层上下文约束。内核代码可能运行在普通进程上下文,也可能运行在中断、软中断或不可抢占区域;有些路径能睡眠,有些路径绝对不能睡;有些锁拿着时会禁用抢占或中断;实时内核还要处理优先级反转和调度延迟。
所以,看内核锁时要多问几句:
- 当前上下文能不能睡眠?
- 持锁期间能不能被抢占?
- 是否可能被中断处理程序重入?
- 它保护的是 per-CPU 数据,还是跨 CPU 共享数据?
- 当前运行的是普通内核,还是 PREEMPT_RT 内核?
- 是否需要优先级继承来控制实时延迟?
可以先抓住几个常见区别:
- mutex 这类 sleeping lock 可以让任务睡眠,适合较长临界区,但不能在中断上下文随便使用。
- spinlock 适合非常短、不能睡的内核路径,持锁期间要避免调用可能阻塞的函数。
- rw_semaphore、rwlock 面向多读单写,但公平性和实时语义会随内核配置变化。
- local lock、关抢占、关中断更偏向保护当前 CPU 上的数据,不能自然替代跨 CPU 锁。
Linux Kernel locking 文档把这些规则写得很细,尤其是 PREEMPT_RT 下锁语义的变化。普通应用开发不需要背完整细节,但要知道一件事:内核锁不能只按“互斥/读写/自旋”几个名字理解,它还和当前上下文能不能睡、能不能被抢占、能不能处理中断紧紧绑在一起。
怎么选同步原语?
如果只是保护一段共享状态修改,先考虑 mutex。它表达清楚,等待时可以睡眠,适合大多数用户态临界区。
如果要限制某类资源同时被多少线程使用,信号量更自然。比如最多 10 个并发下载任务、连接池最多 50 个连接。这个场景的关键是“数量”,不是谁进入临界区。
如果线程要等某个状态变化,用条件变量。队列从空变非空、任务从未完成变完成、缓冲区从满变未满,都属于这种等待条件。记得把状态放在共享变量里,用 mutex 保护,并在 while 中等待。
如果在内核里保护非常短的路径,并且当前上下文不能睡,才考虑 spinlock。用户态业务代码里长期自旋通常是坏味道。
如果你在实现语言运行时、线程库或高性能同步器,futex 这类机制才会进入视野。普通业务代码更应该使用标准库或成熟并发库,而不是直接对 futex 系统调用编程。
这几个判断也解释了为什么 Java 文章里会把 synchronized、ReentrantLock、AQS、CAS 放在一起讲。Java 开发者面对的是语言级抽象;操作系统面对的是线程调度、阻塞唤醒、CPU 原子指令和内核上下文。
常见错误
把锁当成性能开关。
锁先保证正确性,再谈性能。如果共享状态会被写坏,少一把锁只会把 bug 交给调度时机决定。
用 if 等条件变量。
条件变量醒来不代表条件已经成立。醒来后必须重新检查条件。这里用 while 才符合条件变量的使用语义。
把 semaphore 当万能锁。
信号量能做很多事,也正因为如此,代码读起来容易失去语义。只是互斥就用 mutex;只是等一次性事件,内核里常见 completion 这类更直接的工具;需要资源计数时再用 semaphore。
在持锁期间做慢操作。
持锁时访问磁盘、发网络请求、等待外部系统,都会把临界区拖长。线程越多,锁竞争越容易放大成吞吐下降、排队积压甚至死锁。
忽略锁顺序。
两个线程分别按 A -> B 和 B -> A 拿锁,等待环很容易形成。操作系统、数据库、Java 线程都会遇到同样的问题。死锁的完整介绍可以看 死锁详解。
总结
操作系统里的锁不能只按某一个 API 理解。它是一组围绕共享状态、等待条件、资源数量和调度上下文设计出来的同步机制。
mutex 负责互斥,spinlock 用忙等换掉睡眠切换,semaphore 负责计数和限流,condition variable 让线程在条件不满足时睡下去,futex 把用户态原子操作和内核阻塞唤醒接在一起。它们看起来都和“等”有关,实际等待的对象并不一样:有的等进入临界区,有的等资源数量,有的等状态变化,有的等内核把自己重新放回可运行队列。
学 Java 锁时,很多细节会被 JVM 和类库包起来;回到操作系统这一层,重点就变成了:线程什么时候该睡,什么时候可以自旋,谁负责唤醒,哪段代码不能被抢占,哪个上下文不能阻塞。
参考资料
- OSTEP: Locks
- OSTEP: Condition Variables
- OSTEP: Semaphores
- POSIX Programmer's Manual: pthread_mutex_lock
- POSIX Programmer's Manual: pthread_cond_wait
- POSIX Programmer's Manual: pthread_mutexattr_getprotocol
- Linux man-pages: sem_wait
- Linux man-pages: futex
- Linux Kernel Documentation: Lock types and their rules
- Linux Kernel Documentation: Memory Barriers
- Linux Kernel Documentation: RT-mutex subsystem with PI support